
Lockheed Martin’s Skunk Works advanced projects division is moving ahead with plans for developing and evolving what is described as a flexible autonomy framework that is very human-centric. This will center on a suite of artificial intelligence-driven software-based control systems that will enable various tiers of uncrewed aircraft to operate with varying degrees of autonomy and work collaboratively with their crewed counterparts.
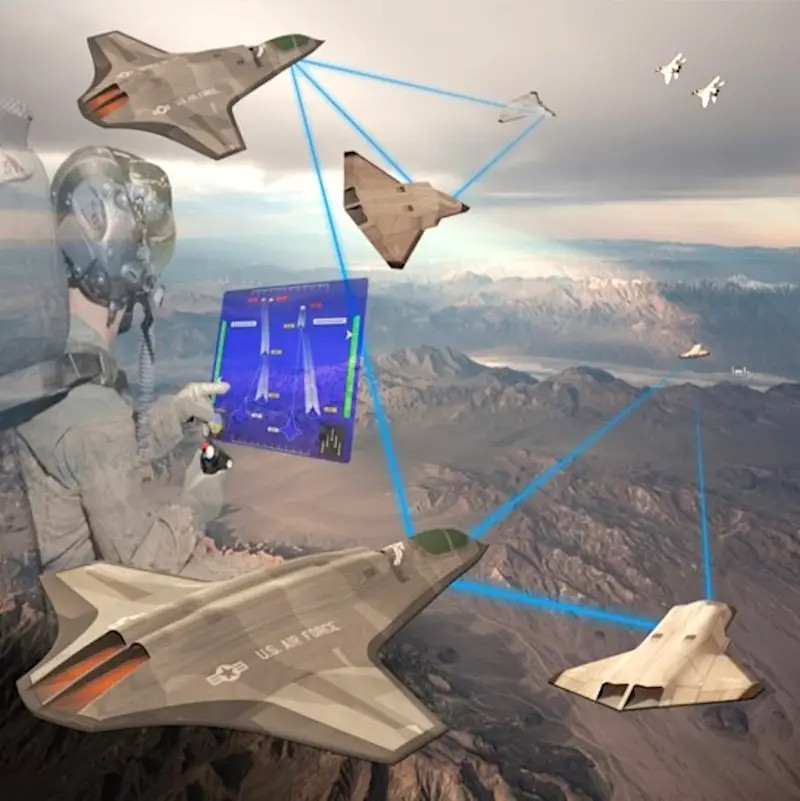
Skunk Works is to begin initial flight testing of these concepts relatively soon, and the first experiments will involve examples of its Speed Racer drone paired with variants of the stealthy F-35 Joint Strike Fighter. Speed Racer is an experimental low-cost “pathfinder” design that was developed first to demonstrate new digital engineering and advanced manufacturing techniques. It has a modular architecture that allows it to be relatively readily reconfigured for different mission sets, a role depicted in the newly released Lockheed Martin artwork at the top of this story.
John Clark, Lockheed Martin Vice President and Skunk Works General Manager, provided a detailed overview of the flexible autonomy plan, known internally as Project Carrera, during a press call yesterday that The War Zone attended. This follows the Skunk Works head detailing a broader vision for a comprehensive multi-layered, distributed crewed-uncrewed teaming concept during an earlier press briefing in July, which you can read all about in detail here.

Carrera is a Spanish word for “race” and is meant to emphasize the speed with which Skunk Works hopes to proceed in this effort, though Clark noted that it is based on work dating back to at least 2007. The Skunk Works head added that the decision to pick this name had been influenced by members of the Skunk Works team working on this project who are also fans of Porsche and its famous Carrera line, including various iterations of the iconic model 911.
“The whole idea was, instead of making the human adapt around the software systems built, we would make the software system adapt around the human,” Clark explained. “Every human likes to interact with systems differently.”
As an example, Clark talked about how an experienced fighter pilot who knows how to operate within a multi-aircraft flight, or even lead such a contingent, immediately has a different understanding of how to work together with one or more uncrewed systems than a rookie aviator. How future drones work collaboratively with traditional aircraft, therefore, needs the flexibility to account for this and a multitude of other human factors.
“What we’re really focusing on is a systematic build-up where we can evaluate that human and uncrewed systems interaction, and understand how those procedures build up over time, such that we can build a system that adapts readily around … that flexible autonomy framework,” the head of Skunk Works said. He added that the current plan involves a series of phases that will “systematically work up with the underlying technology” and help with “exploring how we put all of those things together.”

He went on to note that the initial phases will be focused mostly on defining core desired “behaviors” for autonomous uncrewed aircraft. Subsequent phases will then explore how uncrewed systems with those autonomous capabilities will actually execute an entire ‘kill chain’ in the course of a single mission, including while collaborating with crewed platforms. After that, the focus could shift to how all of this slots into a larger ‘kill web’ involving a much wider array of assets, including space-based systems. In July, Clark disclosed that Skunk Work has at least explored the novel idea of using satellites in low earth orbit (LEO) as uncrewed teammates for crewed aircraft down below.
Clark stressed Project Carrera will emphasize modularity and open-architecture systems, both in terms of hardware and software, as well as leveraging advances in artificial intelligence (AI) and machine learning. The goal is to bake in from the very start the ability to expand functionality and add entirely new capabilities down the road.
The head of Skunk Works described work that is already being done to “layer” AI-driven capabilities on top of existing systems.
“For instance, route planning. We have great route planning capabilities for our vehicles,” Clark explained. “However, we’re now exploring how we can allow artificial intelligence to better inform how to dynamically respond with the events that are happening in real time, and use that as a mechanism to drive maybe a shift in a route or a shift in a sensor employment, such that we can get more effective application of the systems are being deployed.”
“We can’t have a human operator overwhelmed trying to drive” the desired behaviors “out of these uncrewed systems,” he continued. “On the flip side, we can’t have these systems going off and doing things that the operator doesn’t trust them to actually perform.”

Skunk Works, of course, isn’t starting from scratch. As already noted, Clark said Project Carrera is born out of work that dates back at least 15 years, much of which he was directly involved in, having been with the company for more than two decades now. He specifically noted that systems that Lockheed Martin has already provided to the U.S. Air Force as part of its Skyborg program, some of which have flown inside Kratos XQ-58 Valkyrie drones during testing, would feed into Carrera. Skyborg is a multi-faceted project centered on developing an AI-driven “computer brain” and associated systems that could be used to operate various types of uncrewed platforms.

In July, Clark had also mentioned past testing related to the overarching distributed crewed-uncrewed teaming concept that had involved the use of a modified F-16, all but certainly a reference to the X-62A Variable Stability In-flight Simulator Test Aircraft (VISTA). Last year, the Air Force announced that the VISTA aircraft, previously designed NF-16D, was being modified to be better able to support the Skyborg program and other advanced uncrewed aircraft projects, as you can read more about here.
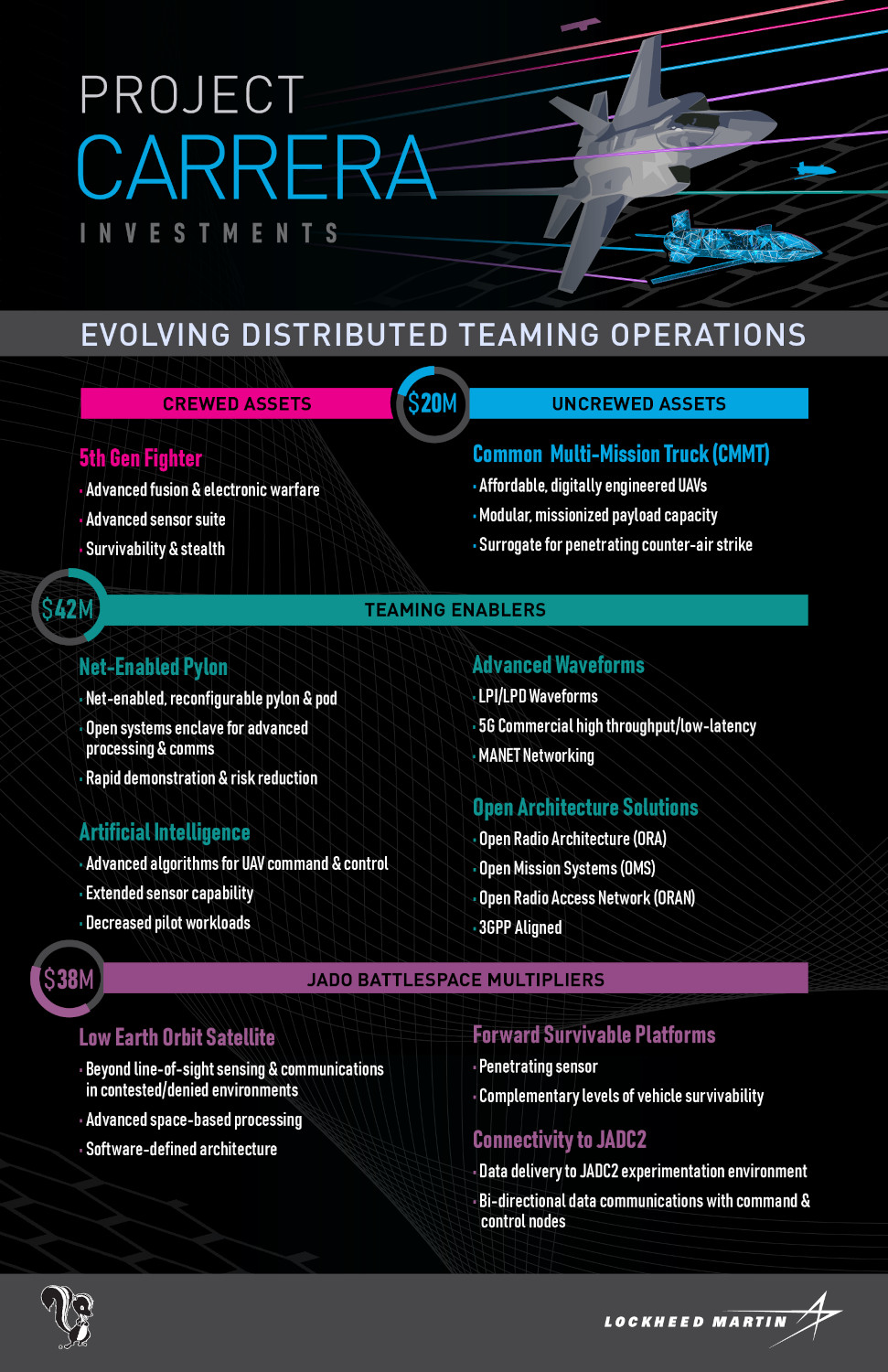
Altogether, Lockheed Martin has spent or otherwise allocated at least $100 million in total internal investment, past and present, on related work ranging from actual crewed and uncrewed aircraft, as well as other hardware, to software and other more conceptual developments. The company provided the infographic seen below, which offers a very basic rundown of the different focus areas.
Clark made clear that Skunk Works feels that its flexible autonomy framework is the glue that holds much of, if not all of this together, and is in many ways more important than any particular uncrewed aircraft design.
“Candidly, as we watch the rest of the environment, this is an area that is not getting as much focus as it should,” the head of Skunk Works said. He elaborated by saying that there is currently much more emphasis on “here’s my crazy [air] vehicle, but, at the end of the day, if you don’t have the autonomy, the underlying behavior… that human-machine interface” what you’ll be left with is drones “huddled around” a crewed platform rather than truly working collaboratively with it.
That being said, specific drone designs are still very important in Skunk Work’s overall crewed-uncrewed teaming vision. Clark said the initial focus on testing using Speed Racer very much reflects the broader collaborative teaming concept Lockheed Martin first unveiled in July.
“I’ll emphasize, as many of you heard as I talked before, this is not the ‘loyal wingman’ concept, this is not just having aircraft follow around, you know, the F-35 like the puppy dog” and there’s “no collaboration,” Clark stressed. “We’re really trying to focus on how we can get into those lower level details of how we collaborate around the human.”
With this in mind, Clark explained that the uncrewed component should be complementary, not supplementary, to the crew component. The particular example he gave was a group of highly autonomous uncrewed aircraft probing or potentially even confusing enemy air defenses, and passing information about those threats to their crewed counterparts. Speed Racer is currently viewed as a platform that will be cheap enough to be expandable – Clark couldn’t provide a specific dollar figure, but said Skunk Works is aiming for a unit cost significantly under $2 million – and is not presently designed to be recovered. This would offer advantages in the scenario Clark described, with the threat posed by enemy air defenses could be especially high, since losing the vehicle is expected.
The Skunk Works boss did say that it was the flexible autonomy framework would ultimately expand to other drone designs, potentially including more costly and exquisite types. With this in mind, the Project Carrera video interesting includes a clip of a test of an X-44A. This shadowy flying wing design represents a previously missing link between Skunk Work’s RQ-3 Darkstar and RQ-170 Sentinel stealthy spy drones, and its existence was only publicly acknowledged a few years ago, as The War Zone was first to report.

This is something that was also discussed back in July, when Lockheed Martin unveiled four distinct uncrewed aircraft designs to go along with its teaming concept announcement. Speed Racer is the basis for one of those designs, which is currently referred to as the Common Multi-Mission Truck (CMMT).

Clark did stress that Skunk Works’ view, at least when it comes to crewed-uncrewed teaming, is that doesn’t necessarily present the value proposition one might want in a closely collaborative situation.
“I’ll say it this way. If you try to put a vehicle immediately around an F 35, and expect it to ‘see’ farther than an F 35 can ‘see,’ that means it has a better sensor than the F 35 does,” he explained, adding that this same general logic applies equally to other subsystems, such as datalinks, and weapons. This, in turn, “means it’s not a very cheap vehicle, which then starts to lend itself to the [question] ‘why isn’t this just another fighter?'”
“One of the analogies that I’ve used with my team is … if you’re playing chess, you don’t want to put all your pawns in the back row and leave the king and the queen exposed on the front row,” Clark added. “When you use your uncrewed systems kind as that front row, that you’re going out and you’re stimulating the other side to perform things, or get behaviors out of them that you want – you may want them to move a certain way – well then you may move a pawn in a certain way to facilitate that.”
Part of the Project Carrera experimentation will involve exploring more general employment concepts for Speed Racer and similar designs. In addition to being designed to be expendable, the current expectation is that the drone, which has yet to make its maiden flight, will be air-launched.
Clark said that one or more fighters or some other kinds of combat aircraft certainly could be responsible for deploying uncrewed aircraft like this, but that it would limit their ability to carry other weapons and stores, among other “regrets” as he called them. The official project video Lockheed Martin released depicts an F-35 launching a future CMMT from a wing pylon, a mode of employment that would negatively impact the jet’s stealthy characteristics, which would be another “regret.”

Clark added that Skunk Works has data that indicates that a focus on cheaper, expandable, air-launched drones could help alleviate other operational and logistics stresses. He specifically highlighted how something like Speed Racer doesn’t, by itself, require runways or other significant infrastructure, though whatever platform carrying it certainly would. The U.S. military, as a whole, has been increasingly highlighting concerns about the vulnerability of established airfields and other infrastructure in potential future high-end conflicts against near-peer adversaries, such as China or Russia, and the need then for new alternative and distributed basing concepts.
So, a more novel way of deploying Speed Racers, especially for doing so en masse, seems likely to be required. Clark said that Skunk Works has already been talking with Lockheed Martin’s Missiles and Fire Control division about potentially leveraging the Rapid Dragon system now being developed for the Air Force. Rapid Dragon, in its current form, is a palletized munitions system that is intended to allow cargo aircraft, such as the C-17A Globemaster III or the C-130 Hercules, to employ variants of the AGM-158 Joint Air-to-Surface Standoff Missile (JASSM) cruise missile and potentially other weapons. You can read more about that system here.

As already noted, Skunk Works very much plans to use Project Carrera, and its first phase especially, to really begin exploring and refining various future collaborative crewed-uncrewed teaming concepts, and the systems that will be necessary to support them. Though this is all being billed primarily as an internal development, Clark did say that the project has already been discussed with representatives from the U.S. Air Force and Navy, and that American military aviators will be asked to provide feedback as work progresses.
The Air Force and the Navy are both very interested in future crewed-uncrewed teaming as part of their separate, but intertwined Next Generation Air Dominance (NGAD) future air combat programs. While the Navy has been more reserved in its public statements regarding its NGAD efforts, the Air Force has been very open, at least on basic levels, about its evolving plans for developing and acquiring what it is currently calling Collaborative Combat Aircraft (CCA).
Skunk Works has also been very open about its ambitious crewed-uncrewed vision, and more details are likely to come as Project Carrera gets close to kicking off its flight test program.
Contact the author: joe@thedrive.com
Loading comments…
Comments couldn’t be loaded. Please refresh the page.