
An Airbus A310 Multi-Role Tanker Transport (MRTT) testbed aircraft has demonstrated its ability to guide and control drones while in flight without direct human interaction, according to the company. The test has laid the early groundwork for Airbus’ future plans to provide its MRTTs with the ability to autonomously refuel uncrewed aircraft, a concept that many air forces around the globe will have to adopt as airpower rapidly evolves towards uncrewed operations.
Airbus Defense and Space announced the milestone on Tuesday, explaining that the demonstration was conducted in partnership with its wholly-owned subsidiary UpNext, which contributed what it has dubbed its ‘Auto’Mate Demonstrator technology.’ Leveraging artificial intelligence and machine learning, the Auto’Mate system allowed the A310 to autonomously command the DT-25 targeting drones that were used for the tests.

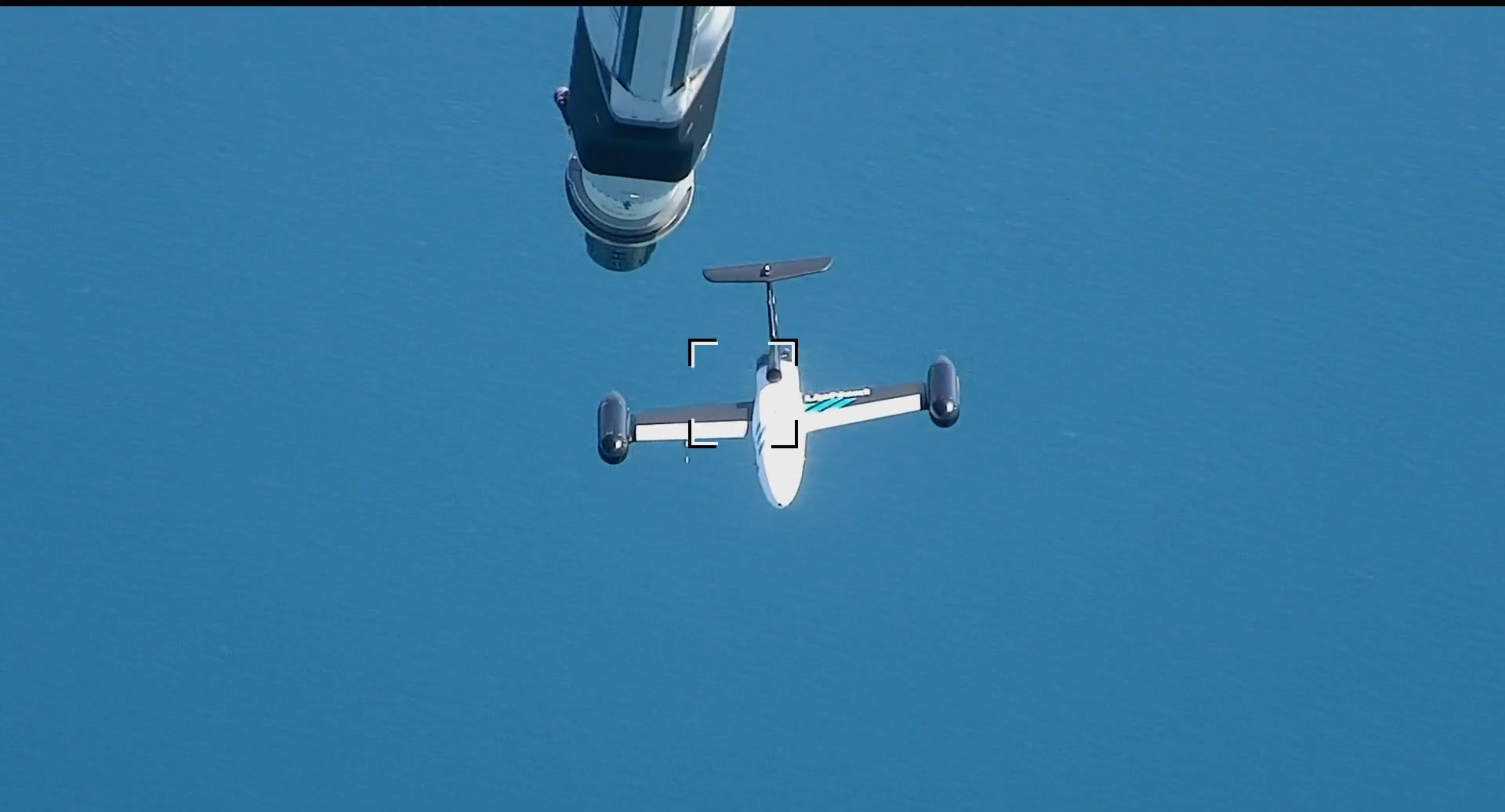
Two separate test flights lasting six hours each were conducted on two different days. The A310 used in this instance is a test aircraft fitted out with an aerial refueling system and the Auto’Mate technology, and the DT-25s serve as expendable multi-purpose aerial targets that can be equipped with the payload necessary for the operation.
The first demonstration began with the A310 taking off from the company’s site at Getafe Air Base in Spain on March 21. At the same time, four DT-25s serving as receiver aircraft were deployed using a pneumatic catapult launcher, one after another, from the seaside Arenosillo Test Centre in Huelva, Spain some 395 miles away.

Airbus said that once the drones were over the Gulf of Cadiz is when control of the aircraft transitioned from the company’s ground station to the A310. The Auto’Mate technology helped the tanker guide and maneuver the DT-25s into the appropriate mock in-flight refueling position, which Airbus explained constituted a minimum recorded distance of 150 feet (45 meters) from the A310.
While the second flight test isn’t mentioned in the Airbus press release, a report published by Defense News prominently highlighted it. The outlet explained that the follow-on demonstration took place on March 23 and explored the same concept in the same way, also using four DT-25 drones and one A310.

It’s important to emphasize that no physical contact occurred and no fuel was actually exchanged in either flight test. With that, it is unclear if these exercises were specifically about refueling using the boom method or if they could extend to other means as well being that Airbus MRTTs can be configured to refuel via the probe-and-drogue method, too.
“The success of this first flight-test campaign paves the way for developing autonomous and unmanned air-to-air refueling technologies,” said Jean Brice Dumont, head of Military Air Systems at Airbus Defence and Space. “Even though we are at an early stage, we have achieved this within just one year and are on the right track for manned-unmanned teaming and future air force operations where fighters and mission aircraft will fly jointly with drone swarms.”

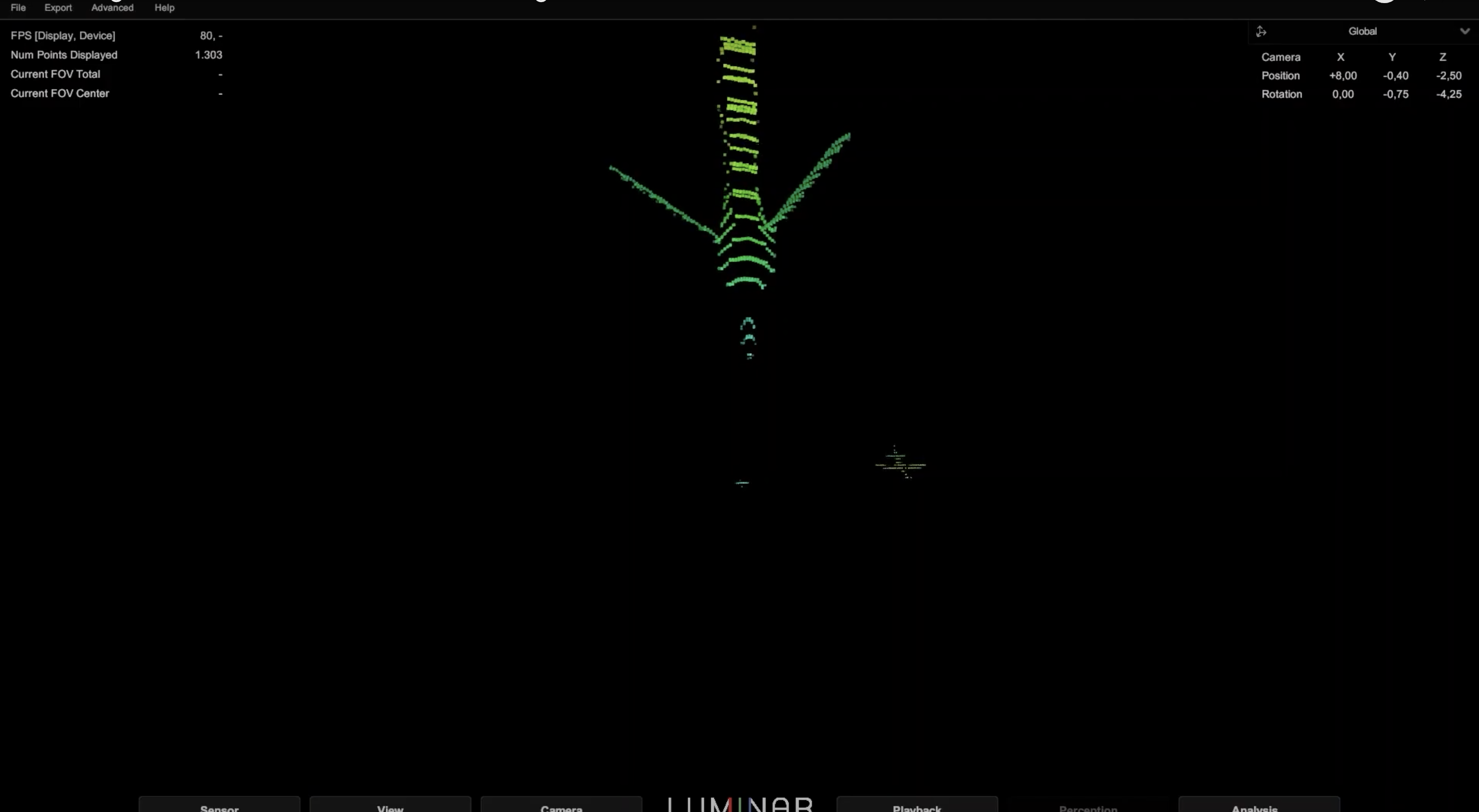
To better understand exactly how Auto’Mate works, especially in terms of just how much autonomy it actually provides, The War Zone reached out to Airbus for clarification on what degree of control was being exerted directly over the drones during the test. Manuel Barriopedro, head of the Auto’Mate demonstrator at Airbus UpNext, explained that “the drones were fully autonomously guided and controlled by the A310 MRTT, specifically by a computer where the artificial intelligence and cooperative control algorithms were running.”
“This computer gathered all the info received from the different relative navigation sources, different types of cameras, LiDAR [light detection and ranging], GPS, etc., fused it and then provided the guidance and control of the receiving DT-25 drones — via direct commands — to the Flight Control Computer,” added Barriopedro. “In this flight test campaign, the control transference was requested by the A310 MRTT and then accepted by the Flight Control Computer. It could be reverted if needed.”
These details would also line up with what Airbus describes in its press release as the “three pillars” that the Auto’Mate technology is centered around.
The first of these pillars is listed as ‘Accurate Relative Navigation,’ or the capability that will keep track of each drone’s position, speed, and altitude relative to the tanker when executing the refueling operation. The second is ‘Intra-Flight Communication,’ or the ability to exchange information between the different assets throughout the maneuver in order to make it possible. The third is ‘Cooperative Control Algorithms,’ which Airbus described as Auto’Mate’s guidance, coordination, consensus, and collision-avoidance functionalities.
Airbus plans to conduct another demonstration from the same locations toward the end of this year. Instead of putting the emphasis on the A310’s guidance and control of the drones, the company said it wants the next test to focus primarily on “exploring the use of navigation sensors based on artificial intelligence and enhanced algorithms for autonomous formation flight.”
The A310’s collision avoidance capabilities will also be further examined the second time around using two simulated drones that will fly near the tanker virtually. Airbus didn’t elaborate on what exactly that will entail, although it will likely be a blending of virtual and constructive test elements, a concept that you can read more about here.
According to Airbus, each of these tests will culminate in an “end-to-end demonstration” of an A310 using the Auto’Mate technology to autonomously refuel a DT-25 drone in flight. This demonstration is projected to occur in mid-2024 if all goes as planned in the meantime.
Airbus is identifying these flight tests with the A310 as the first steps toward validating the company’s Autonomous Formation Flight and Autonomous Air-to-Air Refueling (A4R) concept. According to Airbus, A4R broadly envisions giving tankers the ability to autonomously refuel aircraft at an increased pace with the potential to reduce crew size, cut down on training costs, minimize human error, and offer more effective operations.
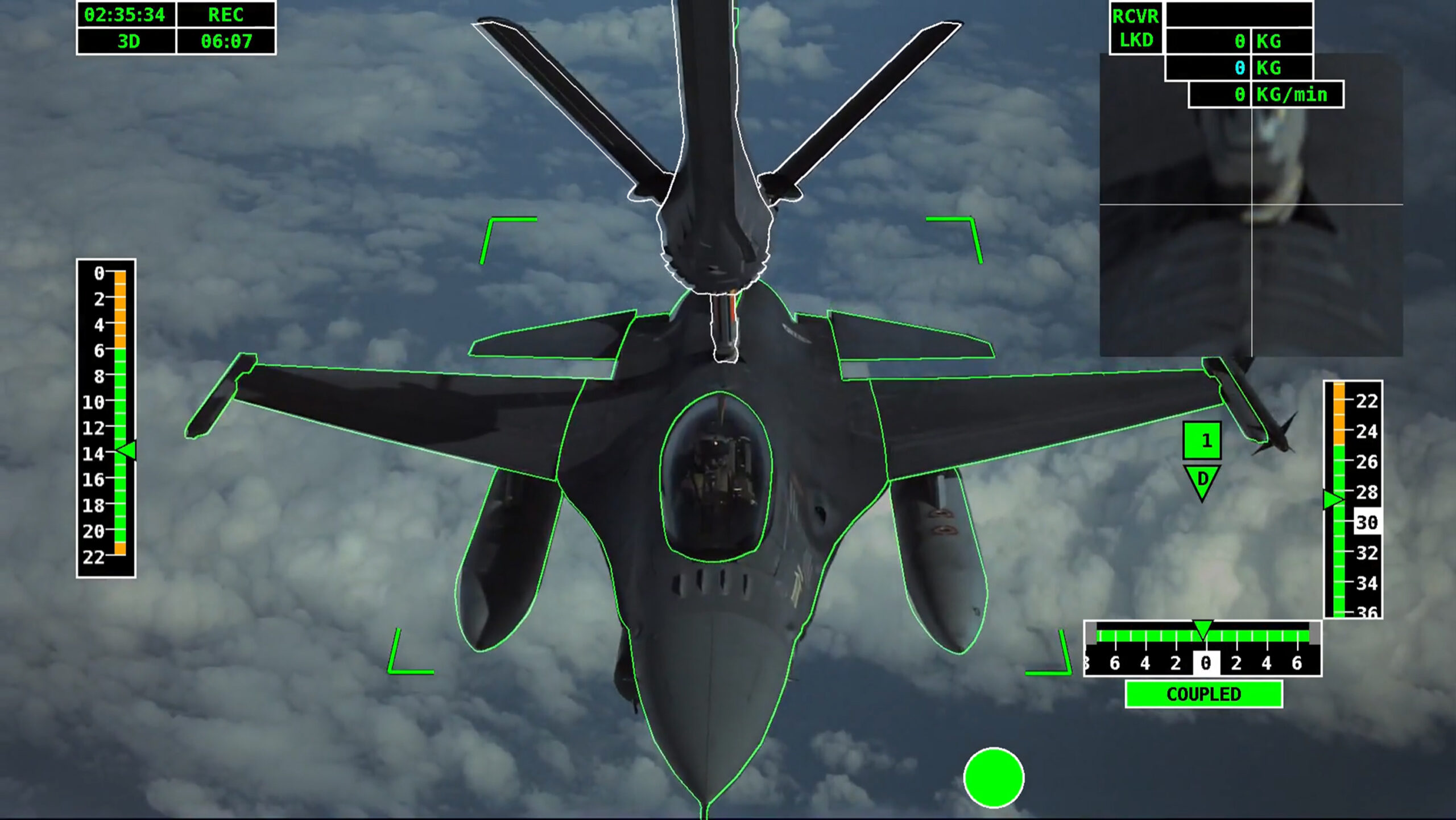
Feeding into the A4R concept is Airbus’ automatic air-to-air refueling (A3R) capability, which the company has partnered with the Republic of Singapore Air Force to develop using an A330 MRTT aircraft and crewed receiver platforms. The tanker has since been certified for daytime A3R boom operations by the Spanish National Institute for Aerospace Technology, and Airbus has made it clear that the Auto’Mate technology will be incorporated into the A330’s ongoing autonomous refueling evolution.
The Airbus press release also noted that the technologies explored throughout this undertaking, namely Auto’Mate, could be re-used in other ongoing development projects like the Future Combat Air System (FCAS). The FCAS effort is essentially the European counterpart of the U.S. Air Force’s Next Generation Air Dominance (NGAD) program, both of which broadly seek to develop an advanced crewed fighter aircraft that can network with and operate alongside uncrewed aerial vehicles.
Like those being developed by Airbus with the A310 and A330 MRTTs, efforts to pair tankers with drones as well as bring certain levels of autonomy into aerial refueling operations have been explored for years.
Of the many efforts that have been publicized, however, include a NASA Dryden Flight Research Center autonomous aerial refueling test campaign that occurred in 2002. During these trials, a F/A-18A equipped with a refueling pod and a separate F/A-18 receiver aircraft tested analytical models for automated aerial refueling of drones.

For a separate research project, the Dryden Flight Research Center continued to explore autonomous aerial refueling with Northrop Grumman and the Defense Advanced Research Projects Agency. In 2007, Dryden used two NASA Global Hawks to help prove not just the viability of uncrewed to uncrewed refueling, but also doing this using high-altitude, long-endurance (HALE) platforms. The successful test project culminated in 2012.

This concept was largely proven just a few years later in a high-profile demonstration of unmanned aerial refueling capability, including actual fuel transfer. The test, led by the Navy, took place in 2015 when Northrop Grumman’s X-47B drone flew into position behind an Omega Aerial Refueling Services Boeing 707 tanker and accepted over 4,000 pounds of fuel.

Boeing’s demonstrator for the uncrewed MQ-25 Stingray carrier-based tanker drone also made history in 2021 for successfully passing fuel to a crewed F/A-18 Super Hornet receiver aircraft using its hose system. While this is a reverse of tanking unmanned aircraft, MQ-25 will refuel unmanned Navy aircraft as part of its future mission set.

Of course, all these efforts involved probe and drogue refueling systems, not a boom and receptacle arrangement like that on the Airbus test MRTT or USAF and many other air arm’s tankers.
In 2006, Boeing Phantom Works and the Air Force Research Laboratory (AFRL) conducted flight tests with KC-135Rs from the New York Air National Guard 107th Air Refueling Wing that demonstrated how a crewed Calspan Learjet testbed equipped to emulate a drone could autonomously maintain a steady refueling station behind a tanker aircraft.
This was achieved using an automated aerial refueling, inner-loop control laws (IL CLAWS) system hosted by a flight control computer that was responsible for maneuvering the Learjet. A few years later in 2012, the AFRL tested an updated Precision GPS (PGPS) algorithm that is intended to enable uncrewed aircraft to refuel from crewed tankers.

Beyond these known trials, there have been rumors that such capabilities have been much further developed in the U.S., as we simply do not know what activities may exist in the classified realm. Clearly, autonomous refueling is key for future USAF advanced drone efforts.
Other concepts that would allow tankers to network with ‘loyal wingman’ type drones are also being evaluated in the U.S. In 2020, a KC-135 specifically was upgraded with new systems under the Real-Time Information in the Cockpit (RTIC) initiative that allowed the Stratotanker to serve as a communications node for other platforms, including armed drones.
Trials conducted demonstrated how the KC-135 could receive data from the Kratos Unmanned Tactical Aerial Platform-22, like full-motion video and sensor information, serving as an example of how uncrewed platforms could communicate with crewed ones in the future. Such capabilities could also offer great value to aerial refueling operations and for providing organic protection to aerial refueling assets via drone.

All told, the capability that Airbus is exploring with its Auto’Mate technology and MRTT aircraft is far from being some abstract experimental exercise. Not only could this technology improve the efficiency of existing tanker operations, including with manned receivers, but it will be absolutely essential for where cutting-edge airpower is quickly headed.
The age of uncrewed combat air vehicles, especially those that are able to team with crewed platforms, is rapidly approaching. Initiatives to realize this capability are occurring around the globe now. For air arms with tanker capability, the option to aerially refuel these drones will be essential when pairing them seamlessly with their crewed counterparts and will drastically increase the flexibility of how, where, and when they are employed.
Uncrewed combat aircraft are also being eyed as protectors for critical high-value assets like tankers and airborne early warning and control aircraft. Being able to keep these aircraft on station when paired with much larger long-endurance platforms will be essential, and autonomous aerial refueling is the key to that.
Australia is already exploring this with its MQ-28 Ghost Bat drone. On top of that, the Royal Australian Air Force actually operates the KC-30 MRTT based on the Airbus A330 airframe, which could set it up for compatibility with the Auto’Mate autonomous refueling technology.

As noted, other air arms are also heading down this path, and the United States’ own Collaborative Combat Aircraft program wants at least 1,000 ‘loyal wingman’ drones within the decade. In order to get the most out of each of these endeavors, an autonomous aerial refueling capability like Auto’Mate will need to be developed and fast.
Contact the author: Emma@thewarzone.com
Loading comments…
Comments couldn’t be loaded. Please refresh the page.